


Modeling VR-systems for haptic interaction with mechanical objects especially textiles
Guido Böttcher, Leibniz Universität Hannover
In the past decades computer graphics has become an essential part in science as it provides algorithms and methods helping to visualise problems and processes in different fields of research. For example, in weather forecasts, models are used to simulate the dynamics of the atmosphere and its interaction with seas and land masses. Without an adequate visualisation of the huge data sets produced by the models, it is very hard to make a forecast relying on the computed data.
By giving the user a visual representation of the computer-generated output it is possible to instantly understand what has been computed and how it is related to a stated problem. This approach has been driven further to a level where the user is completely surrounded by a virtual environment which resembles reality. Special stereoscopic displays create a true three dimensional view that is perfecting the illusion to be fully immersed in this so-called Virtual Reality (VR).
While the graphical rendering of Virtual Environments is more and more indistinguishable from real images, the interaction inside such a world is quite far away from being realistic. Several aspects in the interaction between user and VR are still missing. The most important aspect is the haptic feeling when a user is in contact with an object. Even though we rely mainly on the visual sense we still need the sensation of touching an object. Otherwise we could not intuitively grasp and manipulate inside the VR. Moreover, we have to feel the interaction forces occurring at the contact. Generally speaking, when we grasp an object we have an energy transfer from the user to the object and vice versa. To create a convincing impression of a real touch such transfers have to be addressed appropriately. That means we have to consider the effect of the energy transfer in the mechanical behaviour of the touched object with respect to the underlying material. In case of a rigid object causing a change of potential and kinetic energy, the transfer is visible in the motion, whereas for a soft body , it results in a deformation under the load the user applies at the contact. A VR-System capable of dealing with such physical processes has to make sure that it delivers the contact forces at a very high update rate (approx. 1 kHz). This is a generic requirement for achieving a high fidelity haptic sensation in the interaction.
As the aforementioned considerations are in the whole a demanding task for current computer systems and many of today's VR-systems simplify the interaction to some extent. Their possibilities are either limited to single contact points (no grasping possible) or to contacts of low fidelity by having only accurate force updates of a few Hertz.
The aim of the project is therefore to develop a VR-system that is able to create a link between simulations that can compute physically correct deformations of objects under load while having a high rate update in the contact force. Additionally, it should consider the interaction of two fingers within the virtual environment. A special case of application should be the haptic sensing of contact forces between the fingers and virtual textiles. It should be possible for a user to grasp and touch a piece of fabric. Under these conditions special algorithms have to be developed that are not only able to reproduce the highly dynamic behaviour of textiles but also capable of accurately computing the small forces (order of few grams) at the contact point.
Verbesserte Version als Springer-Buch verfügbar: http://www.springer.com/de/book/9780857299345
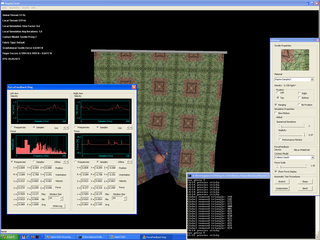
showing an actual screenshot of the VR-system software
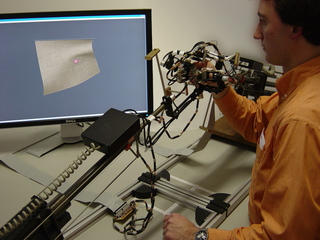
the complete VR-system of the HAPTEX Project operated by a user
